You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Trouble with Skeletal Animation
- Thread starter alvordr
- Start date
Select the skeleton tag on the object your have the joints associated with.
Select the joint that you are bending from the Skeleton Properties. Then from the menu go to Tools, Character, Vertex Weighting. From their you can either add or subtract influence of a joint to a vertex.
Looks like you have a joint in the arm that has influence on a vertex that is part of the body. You need to subtract that influence from the vertex in the body (it will be orange and you want it to be grey).
Sometimes, removing influence can be an issue if you don't have enough geometry (vertices) in areas that bend.
Also, check the help manual.
Select the joint that you are bending from the Skeleton Properties. Then from the menu go to Tools, Character, Vertex Weighting. From their you can either add or subtract influence of a joint to a vertex.
Looks like you have a joint in the arm that has influence on a vertex that is part of the body. You need to subtract that influence from the vertex in the body (it will be orange and you want it to be grey).
Sometimes, removing influence can be an issue if you don't have enough geometry (vertices) in areas that bend.
Also, check the help manual.
Last edited:
alvordr
0
Select the skeleton tag on the object your have the joints associated with.
Select the joint that you are bending from the Skeleton Properties. Then from the menu go to Tools, Character, Vertex Weighting. From their you can either add or subtract influence of a joint to a vertex.
Looks like you have a joint in the arm that has influence on a vertex that is part of the body. You need to subtract that influence from the vertex in the body (it will be orange and you want it to be grey).
Sometimes, removing influence can be an issue if you don't have enough geometry (vertices) in areas that bend.
Also, check the help manual.
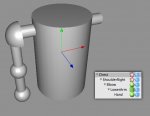
Thank you for the help. I found what you're speaking of and have already looked into the help file, which got me as far as I was. I think now my mesh isn't completely bound to my skeleton, and I'm not even sure what to do from here. I painted left or right to see how it changes for the weighting, but it is all still red. You can see from the picture that the joint is indeed bound to the hip, which isn't exactly what I wanted.

alvordr
0
I rebuilt the skeleton and joints, but I'm still having the same problem. I followed the steps, by going into the skeleton properties, selecting the shoulder, then going to Tools/Character/Vertex Weighting and then trying a subtract and lowering the numbers. It's still rigged from shoulder to hip.

Last edited:
alvordr
0
Hi.
I think this is too much effort for a simple robot rig; you can pretty easy rig it by hierarchy.
I attached a part of a robot like thingy, think you get the idea.")
Cheers
Frank
Thank you, Frank. I'll take a look at it and reply back. Meanwhile, keep in mind that my goal isn't so much the actual model being used, but the concepts, so I think it will be a successful lesson for me. :smile:
alvordr
0
It seems that you're going the same way I originally went, Frank. I had it exactly like you have it now. I can certainly animate by hierarchy, which is what I've been doing all along. I really want to tackle the challenge of learning skeletal animations, as this can help me grasp the physics behind it all and really get some killer animations going. Meanwhile, it's also helping me understand poses and takes, to some degree.
I know I know.
But: I wouldn´t recommend using weighted joints on an almost primitive/geometrically mesh like your robot. Didn´t say it´s not doable.
Why not rig an "primitive" character instead?
But: I wouldn´t recommend using weighted joints on an almost primitive/geometrically mesh like your robot. Didn´t say it´s not doable.
Why not rig an "primitive" character instead?
alvordr
0
I know I know.
But: I wouldn´t recommend using weighted joints on an almost primitive/geometrically mesh like your robot. Didn´t say it´s not doable.
Why not rig an "primitive" character instead?
I'm not sure what you mean by primitive. A human figure perhaps?
I'm not sure what you mean by primitive. A human figure perhaps?
A Dummy maybe.
Attachments
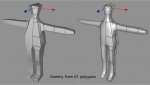

Like Frank has illustrated, put your robot in the classic T pose before binding to the mesh. This can help with only having joints binding to the appropriate vertices.
alvordr
0
Like Frank has illustrated, put your robot in the classic T pose before binding to the mesh. This can help with only having joints binding to the appropriate vertices.
Thank you for the input. I'll have to try that and see what happens.
Another thing to help is to
1 rig your model
2 bind the mesh and start moving the joints around.
3 When you see something is pulling that shouldn't be, leave the rotation or movement where it doesn't look right so that the incorrect vertices are pulling.
4 Then, go into your skeleton, select the joint you are working on and with the vertex weight tool, remove the influence from the vertices that are being pulled incorrectly.
5 The mesh will "snap" back into place after the influence is removed.
1 rig your model
2 bind the mesh and start moving the joints around.
3 When you see something is pulling that shouldn't be, leave the rotation or movement where it doesn't look right so that the incorrect vertices are pulling.
4 Then, go into your skeleton, select the joint you are working on and with the vertex weight tool, remove the influence from the vertices that are being pulled incorrectly.
5 The mesh will "snap" back into place after the influence is removed.
I happened to download you quarter robot file, and was rotating the shoulder joint on the X axis, but I kept getting distortion along the limb. For instance, the hand went from a ball shape to an egg shape. I have noticed this behavior before, but haven't given it a second thought. Does anyone know why it happens and how to control it so that it does not happen?Hi.
I think this is too much effort for a simple robot rig; you can pretty easy rig it by hierarchy.
I attached a part of a robot like thingy, think you get the idea.
Cheers
Frank
A very good animator I worked with was very much against the "classic t-pose". He would build all models with their joints "relaxed" (generally about 33% "bent") which let him build out detail that deformed better at extremes.
The t-pose is not a relaxed pose, and your character will NEVER be seen in it -- so why model it as the least distorted version of your character?
Just a thought.
Lovely low-poly human mesh Frank!
The t-pose is not a relaxed pose, and your character will NEVER be seen in it -- so why model it as the least distorted version of your character?
Just a thought.
Lovely low-poly human mesh Frank!